 BOJ 23289 : 온풍기 안녕! (삼성 SW TEST A형)
A형 필수 알고리즘을 체계적으로 배우고 싶다면? (인프런 바로가기) 삼성 A형 전체 링크 www.acmicpc.net/workbook/view/1152 (A형 문제집) https://www.acmicpc.net/problem/23289 좌표에 맞춰서 상하좌우 define과 dr, dc 배열을 정의한다.#define RIGHT (1)#define LEFT (2)#define UP (3)#define DOWN (4)/* 순서대로 오른쪽 : 1, 왼쪽 : 2, 위 : 3, 아래 : 4 */int dr[] = { 0, 0, 0, -1, 1 };int dc[] = { 0, 1, -1, 0, 0 }; 문제를 풀기 위한 구조체를 정의한다. RC = 온도를 체크해야하는 checkPoint의 좌표 (r, c)HEATE..
2021. 11. 6.
BOJ 23289 : 온풍기 안녕! (삼성 SW TEST A형)
A형 필수 알고리즘을 체계적으로 배우고 싶다면? (인프런 바로가기) 삼성 A형 전체 링크 www.acmicpc.net/workbook/view/1152 (A형 문제집) https://www.acmicpc.net/problem/23289 좌표에 맞춰서 상하좌우 define과 dr, dc 배열을 정의한다.#define RIGHT (1)#define LEFT (2)#define UP (3)#define DOWN (4)/* 순서대로 오른쪽 : 1, 왼쪽 : 2, 위 : 3, 아래 : 4 */int dr[] = { 0, 0, 0, -1, 1 };int dc[] = { 0, 1, -1, 0, 0 }; 문제를 풀기 위한 구조체를 정의한다. RC = 온도를 체크해야하는 checkPoint의 좌표 (r, c)HEATE..
2021. 11. 6.
 BOJ 20057 : 마법사 상어와 토네이도 (삼성 SW TEST A형)
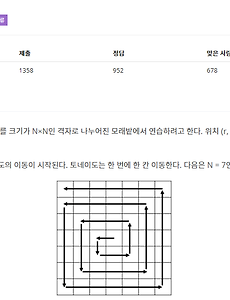
A형 필수 알고리즘을 체계적으로 배우고 싶다면? (인프런 바로가기) 삼성 A형 전체 링크 www.acmicpc.net/workbook/view/1152 (A형 문제집) www.acmicpc.net/problem/20057 시뮬레이션 문제이므로, 그대로 구현하면 된다. 구현 전에 토네이도의 규칙을 알아보자.먼저 토네이도는 최초로 ←로 움직인다. 그리고 순서대로 ↓, →, ↑로 움직이며 4방향을 반복한다.따라서 0, 1, 2, 3을 왼쪽, 아래, 오른쪽, 위로 정의한다./* 순서대로 왼쪽, 아래, 오른쪽, 위 */int dr[] = { 0, 1, 0, -1 };int dc[] = { -1, 0, 1, 0 }; 모래가 일정 비율로 흩날리게 되므로, 모래를 기준으로 좌표를 미리 정해둔다.위에서부터 왼쪽으로 순서..
2021. 4. 16.
BOJ 20057 : 마법사 상어와 토네이도 (삼성 SW TEST A형)
A형 필수 알고리즘을 체계적으로 배우고 싶다면? (인프런 바로가기) 삼성 A형 전체 링크 www.acmicpc.net/workbook/view/1152 (A형 문제집) www.acmicpc.net/problem/20057 시뮬레이션 문제이므로, 그대로 구현하면 된다. 구현 전에 토네이도의 규칙을 알아보자.먼저 토네이도는 최초로 ←로 움직인다. 그리고 순서대로 ↓, →, ↑로 움직이며 4방향을 반복한다.따라서 0, 1, 2, 3을 왼쪽, 아래, 오른쪽, 위로 정의한다./* 순서대로 왼쪽, 아래, 오른쪽, 위 */int dr[] = { 0, 1, 0, -1 };int dc[] = { -1, 0, 1, 0 }; 모래가 일정 비율로 흩날리게 되므로, 모래를 기준으로 좌표를 미리 정해둔다.위에서부터 왼쪽으로 순서..
2021. 4. 16.








