반응형

+ 필터 개수 → depth
(X, X, 1) → (S, S, depth)
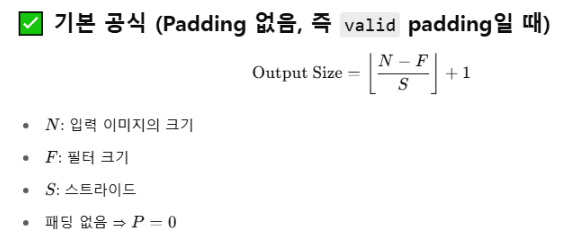
CNN에서 32x32 이미지에 4x4 filter (Stride 2)를 padding 없이 거쳤을 때 생성되는 이미지의 크기
n = 32
s = 2
p = 0
f = 4
(((n + 2 * p - f) / s) + 1), (((n + 2 * p - f) / s) + 1) # (15, 15)
CNN에서 6x6 Input Data에 대해 3×3의 Filter를 거치는 경우 특징맵(피처맵)의 크기는?
n = 6
f = 3
p = 0
s = 1
(((n + 2 * p - f) / s) + 1), (((n + 2 * p - f) / s) + 1) # (4, 4)
# ((n - f) / s + 1), ((n - f) / s + 1) # (4, 4)
원본 이미지가 5 X 5, Stride 1, 필터가 3 x 3?
n = 5
s = 1
p = 0
f = 3
(((n + 2 * p - f) / s) + 1), (((n + 2 * p - f) / s) + 1) # (3, 3)
원본 이미지가 5 x 5, 스트라이드 1, 필터 크기 3 x 3, 패딩 1일 때 Feature Map은?
n = 5
s = 1
p = 1
f = 3
(((n + 2 * p - f) / s) + 1), (((n + 2 * p - f) / s) + 1) # (5, 5)반응형
'개발 > Python' 카테고리의 다른 글
| BernoulliNB (나이브 베이즈) (0) | 2025.10.20 |
|---|---|
| 이상치 탐지 vs 특이치 탐지 (0) | 2025.10.20 |
| 신경망 파라미터 개수 (0) | 2025.10.20 |
| 차트 (0) | 2025.10.14 |
| Ridge, Lasso, Elastic Net (2) | 2025.10.11 |

댓글