다익스트라(데이크스트라)를 이용하면 최소 경로를 찾을 수 있다.
그리고 최소 경로를 찾을 때 해당 경로를 저장해두면 경로도 구할 수 있다.
관련 알고리즘은 아래 링크를 참고하자.
- BOJ 11779 : 최소비용 구하기 2 (최단 경로 기억)
- BOJ 1261 : 알고스팟 (2차원 배열 다익스트라)
그리드 기반으로 맵을 탐색한 후,
빨간 큐브 (0, 1, 0)가 보라색 큐브 (-7, 1, 4)로 가기 위한 최단 경로를 찾아보고 직접 이동도 해보자.
그리드 보다 높게 보이기 위해 y = 1로 설정하였다.
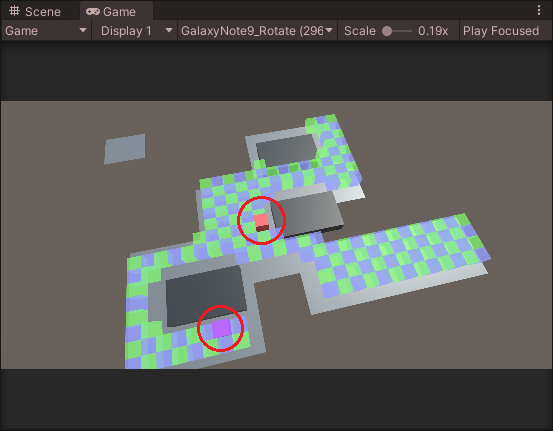
최단 경로를 찾으면 아래와 같다.
Invoke는 필요 없으므로 원래대로 돌린다.
아래의 코드에서 다익스트라를 시작한다.
다익스트라 관련 코드는 #region Dijkstra Algorithm ~ #endregion 사이에 추가한다.
using System; /* Array.Clear */
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class SearchPlane : MonoBehaviour
{
GameObject gridParent;
public GameObject grid1, grid2;
struct QUEUE
{
public int r;
public int c;
}
const int MAP_SIZE = 100;
const int OFFSET = MAP_SIZE / 2;
QUEUE[] queue = new QUEUE[MAP_SIZE * MAP_SIZE];
bool[,] visit = new bool[MAP_SIZE, MAP_SIZE];
int[] dr = { 0, -1, 0, 1 };
int[] dc = { -1, 0, 1, 0 };
bool isPlane(int r, int c)
{
RaycastHit hit;
if(Physics.Raycast(new Vector3(r, 5.0f, c), Vector3.down, out hit, 10.0f))
{
if (hit.collider.tag == "Plane")
return true;
}
return false;
}
bool isPlaneAllDirection(int r, int c)
{
if (isPlane(r, c) == false) return false;
for(int i = 0; i < 4; i++)
{
int nr = r + dr[i];
int nc = c + dc[i];
if (isPlane(nr, nc) == false) return false;
}
return true;
}
void BFS(int sr, int sc)
{
int wp, rp;
wp = rp = 0;
Array.Clear(visit, 0, MAP_SIZE * MAP_SIZE);
queue[wp].r = sr;
queue[wp++].c = sc;
visit[sr + OFFSET, sc + OFFSET] = true;
GameObject go = Instantiate(grid1, new Vector3(sr, 0, sc), Quaternion.identity);
go.transform.SetParent(gridParent.transform);
while (wp > rp)
{
QUEUE output = queue[rp++];
for(int i = 0; i < 4; i++)
{
int nr = output.r + dr[i];
int nc = output.c + dc[i];
if(visit[nr + OFFSET, nc + OFFSET] == false && isPlaneAllDirection(nr, nc) == true)
{
queue[wp].r = nr;
queue[wp++].c = nc;
visit[nr + OFFSET, nc + OFFSET] = true;
if (((nr + nc) % 2) == 0)
go = Instantiate(grid1, new Vector3(nr, 0, nc), Quaternion.identity);
else
go = Instantiate(grid2, new Vector3(nr, 0, nc), Quaternion.identity);
go.transform.SetParent(gridParent.transform);
}
}
}
}
void Start()
{
gridParent = new GameObject("GridParent");
BFS(0, 0);
}
#region Dijkstra Algorithm
// ...
#endregion
}- BOJ 11779 : 최소비용 구하기 2 (최단 경로 기억)
- BOJ 1261 : 알고스팟 (2차원 배열 다익스트라)
최단 경로도 기억해야 하고 2차원 배열에서 다익스트라를 사용해야 한다.
따라서 위의 링크에 있는 알고리즘을 잘 조합해야 한다.
각 맵에 대한 거리를 저장할 distance, 방문 여부를 체크할 visitDijk, 경로를 기억하기 위한 from이 필요하다.
int[,] distance = new int[MAP_SIZE, MAP_SIZE];
bool[,] visitDijk = new bool[MAP_SIZE, MAP_SIZE];
Vector3[,] from = new Vector3[MAP_SIZE, MAP_SIZE];
그리고 우선순위 큐를 위한 HEAP을 선언한다.
pop, push는 전체 코드를 참고한다.
struct HEAP
{
public int r;
public int c;
public int value;
}
HEAP[] heap = new HEAP[MAP_SIZE * MAP_SIZE];
int hn;
다익스트라가 완성된 후 from을 이용해 경로를 찾기 위한 함수는 아래와 같다.
Instantiate를 이용해 하얀 큐브(public으로 path를 선언)를 생성해서 경로를 확인하자.
경로가 잘 보이도록 chPos의 y 값을 0.1f로 하였다.
void DFS(Vector3 pos)
{
Vector3 chPos;
/* 빨간 큐브 좌표를 만나면 종료 */
if (pos.x == 0 && pos.z == 0) return;
DFS(from[(int)pos.x, (int)pos.z]);
chPos = new Vector3(pos.x - OFFSET, 0.1f, pos.z - OFFSET);
Instantiate(path, chPos, Quaternion.identity);
chPos.y = 1.0f;
moveList.Add(chPos);
}
다익스트라 함수는 다음과 같다.
distance를 처리할 때, isPlaneAllDirection을 이용하여 장애물인 경우 100000에 해당하는 penalty를 준다.
그리고 한 칸 이동에 대한 비용이 있어야 하므로 매번 1을 더한다.
void startDijkstra()
{
HEAP tmp, output;
for (int i = 0; i < MAP_SIZE; i++)
for (int k = 0; k < MAP_SIZE; k++)
distance[i, k] = 0x7fff0000;
//빨간 큐브 좌표 초기화.
distance[0 + OFFSET, 0 + OFFSET] = 0;
tmp.r = 0 + OFFSET; tmp.c = 0 + OFFSET;
tmp.value = 0;
push(tmp);
while (hn != 0)
{
output = pop();
if (visitDijk[output.r, output.c]) continue;
visitDijk[output.r, output.c] = true;
for (int i = 0; i < 4; i++)
{
int nr = output.r + dr[i];
int nc = output.c + dc[i];
if (nr < 0 || nc < 0 || nr >= MAP_SIZE || nc >= MAP_SIZE) continue;
int obstacle
= isPlaneAllDirection(nr - OFFSET, nc - OFFSET) ? 0 : 100000 /* penalty */;
if (distance[nr, nc] > distance[output.r, output.c] + obstacle + 1)
{
from[nr, nc] = new Vector3(output.r, 1, output.c);
distance[nr, nc]
= distance[output.r, output.c] + obstacle + 1 /* 한 칸 움직이는 비용 */;
tmp.r = nr; tmp.c = nc;
tmp.value = distance[nr, nc];
push(tmp);
}
}
}
DFS(new Vector3(-7 + OFFSET, 1, 4 + OFFSET) /* 보라색 큐브 좌표 */);
}실제 좌표와 2차원 배열에 저장하기 위한 좌표(OFFSET) 사용에 유의하자.
Start에서 BFS가 완료된 후, 다익스트라를 실행하자.
void Start()
{
gridParent = new GameObject("GridParent");
BFS(0, 0);
startDijkstra();
}
DFS에 의해 경로가 생성되었다.

이제 경로에 따라 블럭을 움직여보자.
여기서는 Invoke 대신 코루틴(Coroutine)을 이용하여 매번 다음 좌표를 넘겨 이동하자.
moveList는 from을 보고 만든 startBlock이 움직여야할 경로다. (스크립트에 startBlock을 public으로 선언)
mcnt는 moveList를 한 칸씩 처리할 index 변수다.
moving은 코루틴 중에 다시 코루틴이 실행되지 않도록 처리하는 bool 변수다.
다익스트라가 완료된 후, dijkstraCheck가 true가 되면 경로를 이동한다.
한 칸 움직일 때 이동하는 시간 blockMoveTime은 0.3초다.
#region 경로 이동 변수
List<Vector3> moveList = new List<Vector3>();
int mcnt;
bool moving, dijkstraCheck;
float blockMoveTime = 0.3f;
#endregion
DFS 안에서 moveList에 좌표를 담아주면 된다.
이때, chPos의 y를 1.0f로 변경해야 움직일 블럭의 높이가 일치하게 된다.
void DFS(Vector3 pos)
{
Vector3 chPos;
/* 빨간 큐브 좌표를 만나면 종료 */
if (pos.x == 0 && pos.z == 0) return;
DFS(from[(int)pos.x, (int)pos.z]);
chPos = new Vector3(pos.x - OFFSET, 0.1f, pos.z - OFFSET);
Instantiate(path, chPos, Quaternion.identity);
chPos.y = 1.0f;
moveList.Add(chPos);
}
블럭 한 칸 이동하기 (그리드 기반 이동, 코루틴)를 참고하여 아래와 같이 moveBlock 코루틴을 만든다.
그리고 Update에서 다익스트라 완료 후(dijkstraCheck = true) 이동한다.
void Start()
{
gridParent = new GameObject("GridParent");
BFS(0, 0);
startDijkstra();
dijkstraCheck = true;
}
...
private IEnumerator moveBlock(Vector3 target)
{
moving = true;
float elapsedTime = 0.0f;
Vector3 currentPosition = startBlock.transform.position;
while (elapsedTime < blockMoveTime)
{
startBlock.transform.position
= Vector3.Lerp(currentPosition, target, elapsedTime / blockMoveTime);
elapsedTime += Time.deltaTime;
yield return null;
}
transform.position = target;
moving = false;
}
void Update()
{
if (dijkstraCheck) /* dijkstra 완료 후 시작 */
{
if (moving == false && mcnt < moveList.Count)
StartCoroutine(moveBlock(moveList[mcnt++]));
}
}
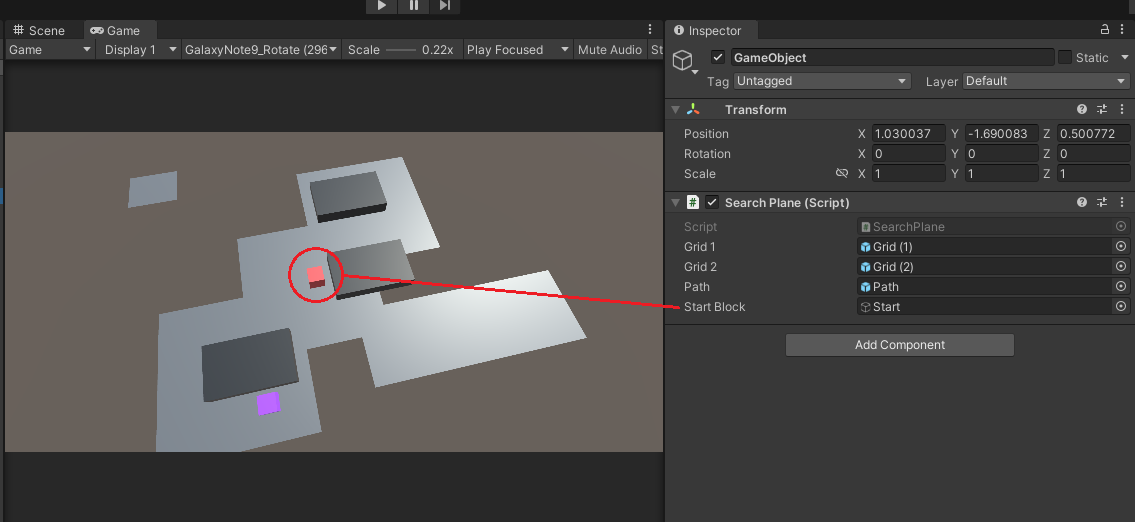
SearchPlane의 설정 상태는 아래와 같다.
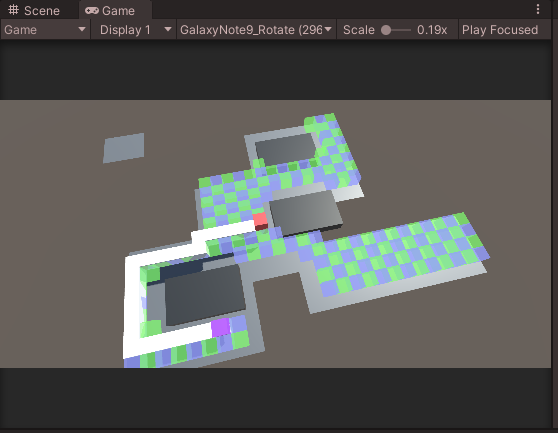
게임을 실행하면 아래와 같이 경로를 따라 움직인다.
아래는 path 생성 코드를 지운 후에 위에서 바라본 모습이다.
최종 코드는 다음과 같다.
using System; /* Array.Clear */
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class SearchPlane : MonoBehaviour
{
GameObject gridParent;
public GameObject grid1, grid2, path, startBlock;
struct QUEUE
{
public int r;
public int c;
}
const int MAP_SIZE = 100;
const int OFFSET = MAP_SIZE / 2;
QUEUE[] queue = new QUEUE[MAP_SIZE * MAP_SIZE];
bool[,] visit = new bool[MAP_SIZE, MAP_SIZE];
int[] dr = { 0, -1, 0, 1 };
int[] dc = { -1, 0, 1, 0 };
bool isPlane(int r, int c)
{
RaycastHit hit;
if(Physics.Raycast(new Vector3(r, 5.0f, c), Vector3.down, out hit, 10.0f))
{
if (hit.collider.tag == "Plane")
return true;
}
return false;
}
bool isPlaneAllDirection(int r, int c)
{
if (isPlane(r, c) == false) return false;
for(int i = 0; i < 4; i++)
{
int nr = r + dr[i];
int nc = c + dc[i];
if (isPlane(nr, nc) == false) return false;
}
return true;
}
void BFS(int sr, int sc)
{
int wp, rp;
wp = rp = 0;
Array.Clear(visit, 0, MAP_SIZE * MAP_SIZE);
queue[wp].r = sr;
queue[wp++].c = sc;
visit[sr + OFFSET, sc + OFFSET] = true;
GameObject go = Instantiate(grid1, new Vector3(sr, 0, sc), Quaternion.identity);
go.transform.SetParent(gridParent.transform);
while (wp > rp)
{
QUEUE output = queue[rp++];
for(int i = 0; i < 4; i++)
{
int nr = output.r + dr[i];
int nc = output.c + dc[i];
if(visit[nr + OFFSET, nc + OFFSET] == false && isPlaneAllDirection(nr, nc) == true)
{
queue[wp].r = nr;
queue[wp++].c = nc;
visit[nr + OFFSET, nc + OFFSET] = true;
if (((nr + nc) % 2) == 0)
go = Instantiate(grid1, new Vector3(nr, 0, nc), Quaternion.identity);
else
go = Instantiate(grid2, new Vector3(nr, 0, nc), Quaternion.identity);
go.transform.SetParent(gridParent.transform);
}
}
}
}
void Start()
{
gridParent = new GameObject("GridParent");
BFS(0, 0);
startDijkstra();
dijkstraCheck = true;
}
#region Dijkstra Algorithm
int[,] distance = new int[MAP_SIZE, MAP_SIZE];
bool[,] visitDijk = new bool[MAP_SIZE, MAP_SIZE];
Vector3[,] from = new Vector3[MAP_SIZE, MAP_SIZE];
struct HEAP
{
public int r;
public int c;
public int value;
}
HEAP[] heap = new HEAP[MAP_SIZE * MAP_SIZE];
int hn;
#region 경로 이동 변수
List<Vector3> moveList = new List<Vector3>();
int mcnt;
bool moving, dijkstraCheck;
float blockMoveTime = 0.3f;
#endregion
HEAP pop()
{
HEAP ret, tmp;
ret = heap[1];
heap[1] = heap[hn];
heap[hn--].value = 0x7fff0000;
for (int i = 1; i * 2 <= hn;)
{
if (heap[i].value < heap[i * 2].value && heap[i].value < heap[i * 2 + 1].value) break;
else if (heap[i * 2].value < heap[i * 2 + 1].value)
{
tmp = heap[i * 2];
heap[i * 2] = heap[i];
heap[i] = tmp;
i = i * 2;
}
else
{
tmp = heap[i * 2 + 1];
heap[i * 2 + 1] = heap[i];
heap[i] = tmp;
i = i * 2 + 1;
}
}
return ret;
}
void push(HEAP x)
{
HEAP tmp;
heap[++hn] = x;
for (int i = hn; i > 1; i /= 2)
{
if (heap[i / 2].value < heap[i].value) break;
tmp = heap[i];
heap[i] = heap[i / 2];
heap[i / 2] = tmp;
}
}
void DFS(Vector3 pos)
{
Vector3 chPos;
/* 빨간 큐브 좌표를 만나면 종료 */
if (pos.x == 0 && pos.z == 0) return;
DFS(from[(int)pos.x, (int)pos.z]);
chPos = new Vector3(pos.x - OFFSET, 0.1f, pos.z - OFFSET);
Instantiate(path, chPos, Quaternion.identity);
chPos.y = 1.0f;
moveList.Add(chPos);
}
void startDijkstra()
{
HEAP tmp, output;
for (int i = 0; i < MAP_SIZE; i++)
for (int k = 0; k < MAP_SIZE; k++)
distance[i, k] = 0x7fff0000;
//빨간 큐브 좌표 초기화.
distance[0 + OFFSET, 0 + OFFSET] = 0;
tmp.r = 0 + OFFSET; tmp.c = 0 + OFFSET;
tmp.value = 0;
push(tmp);
while (hn != 0)
{
output = pop();
if (visitDijk[output.r, output.c]) continue;
visitDijk[output.r, output.c] = true;
for (int i = 0; i < 4; i++)
{
int nr = output.r + dr[i];
int nc = output.c + dc[i];
if (nr < 0 || nc < 0 || nr >= MAP_SIZE || nc >= MAP_SIZE) continue;
int obstacle
= isPlaneAllDirection(nr - OFFSET, nc - OFFSET) ? 0 : 100000 /* penalty */;
if (distance[nr, nc] > distance[output.r, output.c] + obstacle + 1)
{
from[nr, nc] = new Vector3(output.r, 1, output.c);
distance[nr, nc]
= distance[output.r, output.c] + obstacle + 1 /* 한 칸 움직이는 비용 */;
tmp.r = nr; tmp.c = nc;
tmp.value = distance[nr, nc];
push(tmp);
}
}
}
DFS(new Vector3(-7 + OFFSET, 1, 4 + OFFSET) /* 보라색 큐브 좌표 */);
}
private IEnumerator moveBlock(Vector3 target)
{
moving = true;
float elapsedTime = 0.0f;
Vector3 currentPosition = startBlock.transform.position;
while (elapsedTime < blockMoveTime)
{
startBlock.transform.position
= Vector3.Lerp(currentPosition, target, elapsedTime / blockMoveTime);
elapsedTime += Time.deltaTime;
yield return null;
}
transform.position = target;
moving = false;
}
void Update()
{
if (dijkstraCheck) /* dijkstra 완료 후 시작 */
{
if (moving == false && mcnt < moveList.Count)
StartCoroutine(moveBlock(moveList[mcnt++]));
}
}
#endregion
}
Unity Plus:
Easy 2D, 3D, VR, & AR software for cross-platform development of games and mobile apps. - Unity Store
Have a 2D, 3D, VR, or AR project that needs cross-platform functionality? We can help. Take a look at the easy-to-use Unity Plus real-time dev platform!
store.unity.com
Unity Pro:
Unity Pro
The complete solutions for professionals to create and operate.
unity.com
Unity 프리미엄 학습:
Unity Learn
Advance your Unity skills with live sessions and over 750 hours of on-demand learning content designed for creators at every skill level.
unity.com
'개발 > Unity' 카테고리의 다른 글
| 유니티 - OverlapSphere로 주변 콜라이더 탐색하기 (Check Collisions using OverlapSphere) (1) | 2022.07.21 |
|---|---|
| 유니티 - 자식 오브젝트 접근, 순회하기 (Iterating Child GameObjects) (0) | 2022.07.19 |
| 유니티 - BFS를 이용하여 평면을 그리드로 나누기 (Converting a Plane to a Grid with BFS) (0) | 2022.07.16 |
| 유니티 - 인보크로 일정 시간 이후 함수 실행하기, 반복하기 (Invoke) (0) | 2022.07.16 |
| 유니티 Attribute - ExecuteInEditMode / ExecuteAlways로 편집 모드에서 스크립트 실행하기 (0) | 2022.07.10 |




댓글